 Hotline: +84 - 911522133
Hotline: +84 - 911522133

| STT |
|---|
The AXI-Streaming interface is important for designs that need to process a stream of data, such as samples coming from an ADC, or images coming from a camera. In this tutorial, we go through the steps to create a custom IP in Vivado with both a slave and master AXI-Streaming interface. The custom IP will be written in Verilog and it will simply buffer the incoming data at the slave interface and make it available at the master interface - in other words, it will be a FIFO. We’ll test the custom IP using a DMA which we’ll use to push streaming data into the IP and pull data out of the IP. We’ll use an SDK application to setup these DMA transfers and compare the sent data with the received data. The hardware we use for testing this will be the MicroZed 7010, so this is a Zynq-7000 design.
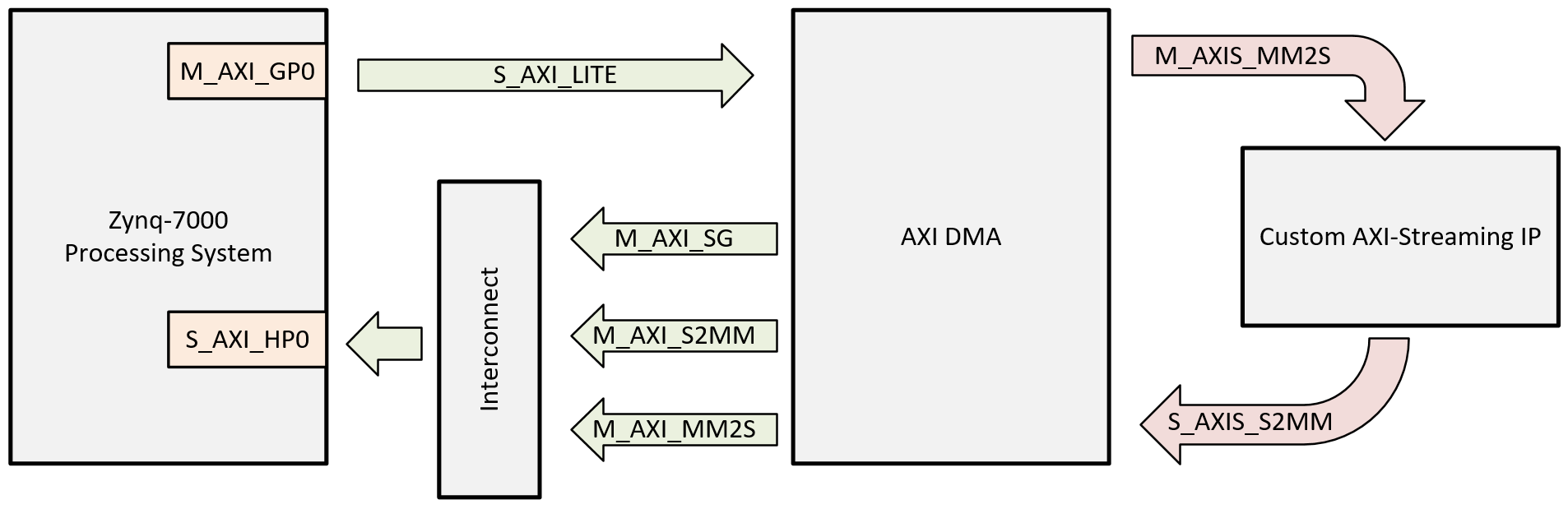
The above image is a basic block diagram of our Vivado design, it shows how the DMA connects to the Zynq Processing System, and also how the custom IP connects to the AXI-Streaming interfaces of the DMA. If you are not familiar with the DMA IP, you should checkout this tutorial on using the DMA.
The Verilog code for our custom IP is based on an asynchronous AXI-Streaming FIFO written by Alex Forencich. You can find the original code on his Github repo, as well as a bunch of other useful modules. I’ve had to slightly modify the code for this project and you’ll be able to copy and paste it from below:
/*
Copyright (c) 2014-2017 Alex Forencich
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
*/
/*
Modified by Jeff Johnson http://www.fpgadeveloper.com
- Renamed ports to match Vivado's naming for AXI-Streaming slave and master
- Removed the async reset input to the module
- Added separate resets for slave and master interfaces
- Removed the tuser signals (not used by Vivado)
*/
// Language: Verilog 2001
`timescale 1ns / 1ps
/*
* AXI4-Stream asynchronous FIFO
*/
module axis_fifo_v1_0 #
(
parameter ADDR_WIDTH = 12,
parameter C_AXIS_TDATA_WIDTH = 32
)
(
/*
* AXI slave interface (input to the FIFO)
*/
input wire s00_axis_aclk,
input wire s00_axis_aresetn,
input wire [C_AXIS_TDATA_WIDTH-1:0] s00_axis_tdata,
input wire [(C_AXIS_TDATA_WIDTH/8)-1 : 0] s00_axis_tstrb,
input wire s00_axis_tvalid,
output wire s00_axis_tready,
input wire s00_axis_tlast,
/*
* AXI master interface (output of the FIFO)
*/
input wire m00_axis_aclk,
input wire m00_axis_aresetn,
output wire [C_AXIS_TDATA_WIDTH-1:0] m00_axis_tdata,
output wire [(C_AXIS_TDATA_WIDTH/8)-1 : 0] m00_axis_tstrb,
output wire m00_axis_tvalid,
input wire m00_axis_tready,
output wire m00_axis_tlast
);
reg [ADDR_WIDTH:0] wr_ptr_reg = {ADDR_WIDTH+1{1'b0}}, wr_ptr_next;
reg [ADDR_WIDTH:0] wr_ptr_gray_reg = {ADDR_WIDTH+1{1'b0}}, wr_ptr_gray_next;
reg [ADDR_WIDTH:0] wr_addr_reg = {ADDR_WIDTH+1{1'b0}};
reg [ADDR_WIDTH:0] rd_ptr_reg = {ADDR_WIDTH+1{1'b0}}, rd_ptr_next;
reg [ADDR_WIDTH:0] rd_ptr_gray_reg = {ADDR_WIDTH+1{1'b0}}, rd_ptr_gray_next;
reg [ADDR_WIDTH:0] rd_addr_reg = {ADDR_WIDTH+1{1'b0}};
reg [ADDR_WIDTH:0] wr_ptr_gray_sync1_reg = {ADDR_WIDTH+1{1'b0}};
reg [ADDR_WIDTH:0] wr_ptr_gray_sync2_reg = {ADDR_WIDTH+1{1'b0}};
reg [ADDR_WIDTH:0] rd_ptr_gray_sync1_reg = {ADDR_WIDTH+1{1'b0}};
reg [ADDR_WIDTH:0] rd_ptr_gray_sync2_reg = {ADDR_WIDTH+1{1'b0}};
reg s00_rst_sync1_reg = 1'b1;
reg s00_rst_sync2_reg = 1'b1;
reg s00_rst_sync3_reg = 1'b1;
reg m00_rst_sync1_reg = 1'b1;
reg m00_rst_sync2_reg = 1'b1;
reg m00_rst_sync3_reg = 1'b1;
reg [C_AXIS_TDATA_WIDTH+2-1:0] mem[(2**ADDR_WIDTH)-1:0];
reg [C_AXIS_TDATA_WIDTH+2-1:0] mem_read_data_reg = {C_AXIS_TDATA_WIDTH+2{1'b0}};
reg mem_read_data_valid_reg = 1'b0, mem_read_data_valid_next;
wire [C_AXIS_TDATA_WIDTH+2-1:0] mem_write_data;
reg [C_AXIS_TDATA_WIDTH+2-1:0] m00_data_reg = {C_AXIS_TDATA_WIDTH+2{1'b0}};
reg m00_axis_tvalid_reg = 1'b0, m00_axis_tvalid_next;
// full when first TWO MSBs do NOT match, but rest matches
// (gray code equivalent of first MSB different but rest same)
wire full = ((wr_ptr_gray_reg[ADDR_WIDTH] != rd_ptr_gray_sync2_reg[ADDR_WIDTH]) &&
(wr_ptr_gray_reg[ADDR_WIDTH-1] != rd_ptr_gray_sync2_reg[ADDR_WIDTH-1]) &&
(wr_ptr_gray_reg[ADDR_WIDTH-2:0] == rd_ptr_gray_sync2_reg[ADDR_WIDTH-2:0]));
// empty when pointers match exactly
wire empty = rd_ptr_gray_reg == wr_ptr_gray_sync2_reg;
// control signals
reg write;
reg read;
reg store_output;
assign s00_axis_tready = ~full & ~s00_rst_sync3_reg;
assign m00_axis_tvalid = m00_axis_tvalid_reg;
assign mem_write_data = {s00_axis_tlast, s00_axis_tdata};
assign {m00_axis_tlast, m00_axis_tdata} = m00_data_reg;
// reset synchronization
always @(posedge s00_axis_aclk) begin
if (!s00_axis_aresetn) begin
s00_rst_sync1_reg <= 1'b1;
s00_rst_sync2_reg <= 1'b1;
s00_rst_sync3_reg <= 1'b1;
end else begin
s00_rst_sync1_reg <= 1'b0;
s00_rst_sync2_reg <= s00_rst_sync1_reg | m00_rst_sync1_reg;
s00_rst_sync3_reg <= s00_rst_sync2_reg;
end
end
always @(posedge m00_axis_aclk) begin
if (!m00_axis_aresetn) begin
m00_rst_sync1_reg <= 1'b1;
m00_rst_sync2_reg <= 1'b1;
m00_rst_sync3_reg <= 1'b1;
end else begin
m00_rst_sync1_reg <= 1'b0;
m00_rst_sync2_reg <= s00_rst_sync1_reg | m00_rst_sync1_reg;
m00_rst_sync3_reg <= m00_rst_sync2_reg;
end
end
// Write logic
always @* begin
write = 1'b0;
wr_ptr_next = wr_ptr_reg;
wr_ptr_gray_next = wr_ptr_gray_reg;
if (s00_axis_tvalid) begin
// input data valid
if (~full) begin
// not full, perform write
write = 1'b1;
wr_ptr_next = wr_ptr_reg + 1;
wr_ptr_gray_next = wr_ptr_next ^ (wr_ptr_next >> 1);
end
end
end
always @(posedge s00_axis_aclk) begin
if (s00_rst_sync3_reg) begin
wr_ptr_reg <= {ADDR_WIDTH+1{1'b0}};
wr_ptr_gray_reg <= {ADDR_WIDTH+1{1'b0}};
end else begin
wr_ptr_reg <= wr_ptr_next;
wr_ptr_gray_reg <= wr_ptr_gray_next;
end
wr_addr_reg <= wr_ptr_next;
if (write) begin
mem[wr_addr_reg[ADDR_WIDTH-1:0]] <= mem_write_data;
end
end
// pointer synchronization
always @(posedge s00_axis_aclk) begin
if (s00_rst_sync3_reg) begin
rd_ptr_gray_sync1_reg <= {ADDR_WIDTH+1{1'b0}};
rd_ptr_gray_sync2_reg <= {ADDR_WIDTH+1{1'b0}};
end else begin
rd_ptr_gray_sync1_reg <= rd_ptr_gray_reg;
rd_ptr_gray_sync2_reg <= rd_ptr_gray_sync1_reg;
end
end
always @(posedge m00_axis_aclk) begin
if (m00_rst_sync3_reg) begin
wr_ptr_gray_sync1_reg <= {ADDR_WIDTH+1{1'b0}};
wr_ptr_gray_sync2_reg <= {ADDR_WIDTH+1{1'b0}};
end else begin
wr_ptr_gray_sync1_reg <= wr_ptr_gray_reg;
wr_ptr_gray_sync2_reg <= wr_ptr_gray_sync1_reg;
end
end
// Read logic
always @* begin
read = 1'b0;
rd_ptr_next = rd_ptr_reg;
rd_ptr_gray_next = rd_ptr_gray_reg;
mem_read_data_valid_next = mem_read_data_valid_reg;
if (store_output | ~mem_read_data_valid_reg) begin
// output data not valid OR currently being transferred
if (~empty) begin
// not empty, perform read
read = 1'b1;
mem_read_data_valid_next = 1'b1;
rd_ptr_next = rd_ptr_reg + 1;
rd_ptr_gray_next = rd_ptr_next ^ (rd_ptr_next >> 1);
end else begin
// empty, invalidate
mem_read_data_valid_next = 1'b0;
end
end
end
always @(posedge m00_axis_aclk) begin
if (m00_rst_sync3_reg) begin
rd_ptr_reg <= {ADDR_WIDTH+1{1'b0}};
rd_ptr_gray_reg <= {ADDR_WIDTH+1{1'b0}};
mem_read_data_valid_reg <= 1'b0;
end else begin
rd_ptr_reg <= rd_ptr_next;
rd_ptr_gray_reg <= rd_ptr_gray_next;
mem_read_data_valid_reg <= mem_read_data_valid_next;
end
rd_addr_reg <= rd_ptr_next;
if (read) begin
mem_read_data_reg <= mem[rd_addr_reg[ADDR_WIDTH-1:0]];
end
end
// Output register
always @* begin
store_output = 1'b0;
m00_axis_tvalid_next = m00_axis_tvalid_reg;
if (m00_axis_tready | ~m00_axis_tvalid) begin
store_output = 1'b1;
m00_axis_tvalid_next = mem_read_data_valid_reg;
end
end
always @(posedge m00_axis_aclk) begin
if (m00_rst_sync3_reg) begin
m00_axis_tvalid_reg <= 1'b0;
end else begin
m00_axis_tvalid_reg <= m00_axis_tvalid_next;
end
if (store_output) begin
m00_data_reg <= mem_read_data_reg;
end
end
endmodule
Remember, when you create the custom IP, Vivado will auto-generate a top level wrapper (filename is axis_fifo_v1_0.v) and some code to drive the slave and master AXI-Streaming interfaces. You’ll have to paste the above code over the top module source code (axis_fifo_v1_0.v) of the auto-generated IP. The other two auto-generated source files can be left as they are - they will be removed from the hierarchy as soon as you replace and save the top module code, because they will no longer be instantiated by the top module.
When building our Vivado design, just after generating a HDL wrapper for the block design, you will see some critical warnings related to timing of the DDR interface. These critical warnings can be ignored and they are related to some values in the board files. See this forum post for more information:
We test the custom IP by making the DMA push data through the AXI-Streaming slave interface and to pull data out of the AXI-Streaming master interface of our custom IP. The application we will use for this is one of the example applications for the DMA that can be found in the Xilinx SDK installation files. You will find it on this path:
C:\Xilinx\SDK\2017.3\data\embeddedsw\XilinxProcessorIPLib\drivers\axidma_v9_4\examples
In this tutorial, we use the scatter gather poll example (xaxidma_example_sg_poll.c), but as we hooked up the interrupts in the Vivado design, we could have also used the interrupt based one (xaxidma_example_sg_intr.c).
Once you’ve gotten this working, I suggest you try modifying the test application in the SDK to print out what is actually being sent and received. You could then modify your Verilog code to do some kind of manipulation of the incoming data, rebuild everything and verify with your test application that the data coming out is what you expected. Another useful thing to do when building custom IP blocks like this is to write a test bench and simulate the custom IP, this will be the topic of a future tutorial.